
Schmalz
Area Gripping Systems and End Effectors







Schmalz
Area Gripping Systems and End Effectors
Los sistemas de planos aspirantes y los efectores finales son sistemas de ventosas que se pueden instalar directamente en el robot.
Opciones
Conozca nuestra gama
Sistemas de ventosas de diseño ligero SLG
Garra de diseño ligero, configurada individualmente y de fabricación aditiva, para manipular cajas de cartón, bolsas y todo tipo de piezas.
Manipulación universal de piezas de forma libre, como chapas, y de piezas planas.
Ideal para robots ligeros y cobots gracias a su diseño compatible con MRC
Gran capacidad de carga con un peso mínimo gracias a la fabricación aditiva
Adaptación individual del sistema de ventosas a la pieza
Carga máx. 10 kg
Dimensiones máx: 350 x 350 x 250 mm
Fotos



Sistemas de planos aspirantes FQE
Plano aspirante universal configurable con generación de vacío integrada o externa para la manipulación de piezas.
Plano aspirante flexible para la manipulación de productos independientemente del tamaño y la geometría
Permite la manipulación de productos desde diferentes posiciones de recogida
Normalmente se utiliza para aplicaciones de "Pick & Place" o para el embalaje de final de línea en intralogística
Generación de vacío integrada y eficiente en términos de energía para reducir los costos de operación
Fotos



Garras de los dedos
Finger grippers are suitable for a wide range of gripping and handling tasks. Due to the special finger geometry, products are gripped form-fittingly and at the same time gently and with low marks. The flexible finger connection enables both centric and parallel gripping with only one tool.
For direct use with food as well as for pick & place applications.
Fotos



Bin picker sbpg
Garras de vacío para el "agarre en la caja" automatizado en el sector del embalaje y la logística, teniendo en cuenta los requisitos del MRK.
Manipulación de piezas de conformado libre gracias a la ventosa flexible, que se adapta óptimamente al contorno de la pieza.
Ideal para tareas de manipulación estacionarios con robots colaborativos gracias el peso propio reducido.
Fotos



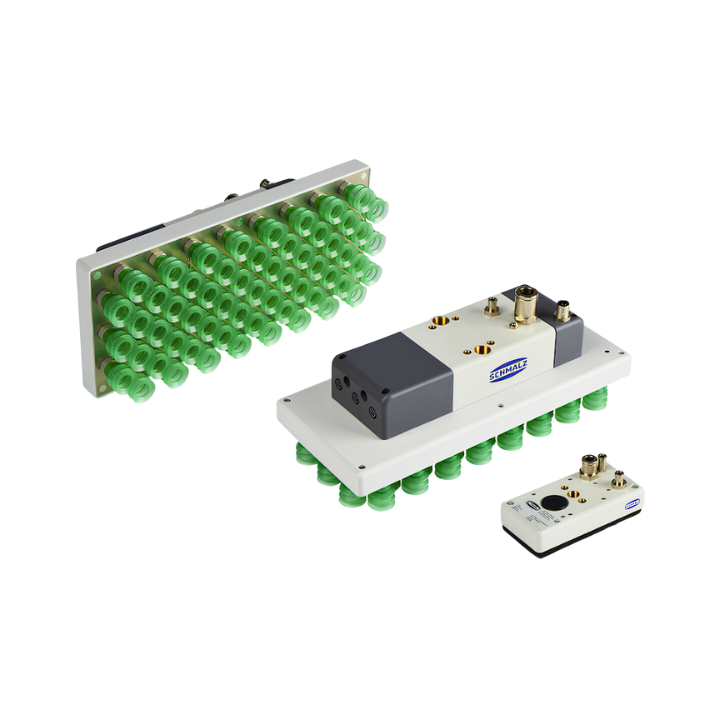
Sistemas de planos aspirantes FXCB/FMCB
El sistema de planos aspirantes FXCB/FMCB es ideal para tareas de manipulación estacionarias con robots colaborativos. Es adecuado para manipular piezas independientemente de su tamaño y geometría. El sistema de planos aspirantes está equipado con una generación de vacío neumática integrada. Debido a su peso propio especialmente bajo y a su diseño redondeado, esta garra es especialmente adecuada para el funcionamiento con MRK.
Un diseño de producto innovador, la ampliación de la superficie de contacto y la reducción de las fuerzas de impacto.
Para todos los campos de aplicación en el ámbito de la intralogística (p. ej., aplicaciones de End-of-Line-Packaging o de Pick & Place) con robots para la colaboración hombre-robot.
Fotos



Sistema ventosas vacío superficies FXP/FMP
Los sistemas de planos aspirantes FXP y FMP garantizan máxima flexibilidad en los ciclos de manipulación automatizados. Con una sola ventosa, resulta posible el paletizado automatizado, el despaletizado, la preparación para el suministro y la clasificación de las mercancías más diversas y de las dimensiones más diversas. Se pueden manipular piezas de diferentes materiales tales como, cartón, madera, chapa (seca) y plástico, con como sin recortes. La serie FXP/FMP genera una fuerza de aspiración un 86 % superior, por término medio, a la de otras garras comparables del mercado.
Fotos



Sistemas de planos aspirantes FX/FM
Los sistemas de planos aspirantes son adecuados para un extenso espectro de aplicaciones. Sujetan distintas superficies y geometrías, piezas porosas o herméticas, así como piezas en posiciones no definidas. Los planos aspirantes FX/FM se distinguen por su tamaño compacto y su reducido peso. Son ideales para el uso en envasadoras, como Case-Packer. Las garras se pueden adquirir con un generador de vacío integrado (FX) y con un racor de conexión para la generación de vacío externa (FM).
Fotos



Sistemas de planos aspirantes FMHD
Robusta garra de vacío para generador de vacío externo para la manipulación eficiente de madera aserrada, productos pegados y cepillados, tableros, madera estructural, palets y elementos de cajones. Ideal para las condiciones de operación en aserraderos, empresas del sector maderero y empresas de construcción de mobiliario. Ideal para piezas muy porosas y retorcidas.
Fotos



Efectores finales de vacío VEE
Efector final de vacío para aplicaciones Pick & Place rápidas, especialmente en la industria del envase.
Montaje rápido y rentable de efectores finales de vacío para procesos de envasado de alta velocidad.
Componentes individuales de configuración flexible y perfectamente adaptados.
Fotos



Esponjas hermetizantes para sistemas de planos aspirantes
Las esponjas hermetizantes se utilizan en sistemas de ventosas de vacío para una amplia variedad de operaciones de manipulación. Para una adaptación óptima a la pieza. La ventaja de las esponjas hermetizantes es que permiten a una sola garra manipular distintas piezas prácticamente sin fugas. De esta forma, las piezas se mueven sin irregularidades, rugosidades ni deterioros de forma eficiente y dinámica.
Fotos



Explora más
Otros productos que te pueden interesar




Para más información
- Contáctenos
Para más información
Para más información